Coordinate Frames¶
A body’s position and orientation can only be measured relative to another set of basis vectors (coordinate-frame). In this formulation, inertial sensors provide the information to compute the attitude and position of a body in space relative to an “inertial” frame, such as the Earth-Centered, Earth-Fixed frame (ECEF) or the North/East/Down-frame (NED)[1]. The equations to come use the superscripts listed in Table 1 to specify the frame in which a variable is measured.
| Frame | Superscript | Description |
|---|---|---|
| ECEF-Frame | E | Frame aligned with Earth’s axis (z-axis parallel to axis-of-
rotation, x-axis exits at the equator through the prime-
meridian); rotates with the Earth (not shown in Figure 1)
|
| NED-Frame | N | Frame aligned with the local tangent-frame (z-axis parallel to
the gravity vector) with the x-axis aligned with true or
magnetic north. Red lines in Figure 1.
|
| Perp-Frame | \(\perp\) | Frame aligned with the local tangent-frame (\(z_\perp\)-axis
parallel to the gravity vector). Dark blue lines in Figure 1
|
| Body-Frame | B | Frame aligned with the body-frame. \(x_\perp\)-axis lies in the
plane formed by the \(x_\perp\) and \(z_\perp\)-axes. Light
blues lines in Figure 1
|
Figure 1 shows the relative orientation of three of the four frames listed in Table 1 (ECEF not shown) for a hypothetical body on the surface of the Earth with a roll of 20°, a pitch of 10°, and a heading of 30°. The dashed red lines illustrate the components of the \(\perp\)-frame axes in the N-Frame while the dashed blue lines indicate the projection of the B-Frame axes onto the N-frame.
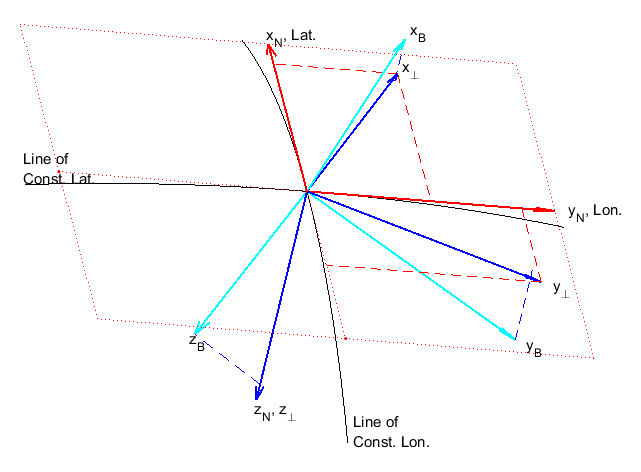
Figure 1: Coordinate Frames used in Derivation (N, perp, and B-Frames)
| [1] | Strictly speaking, neither the ECEF-frame nor the NED-frame are inertial. Both move and rotate relative to the stars; the NED-frame changes with location as well. However, the two are sufficient for use with the OpenIMU line of products. |